
わかりやすく解説して欲しいな。
こんなお悩みを解決します。
どうも。こんにちは。
ケミカルエンジニアのこーしです。
本日は、「モデル予測制御とは?」についてわかりやすく解説していきます。
化学や石油、電力などのプロセス産業におけるモデル予測制御について、初歩の初歩から解説したいと思います。
モデル予測制御は、プラントのコスト削減を考える上で、重要な役割を果たしますので、ぜひ一緒に勉強していきましょう!
本記事の内容
- モデル予測制御とは
- モデル予測制御の歴史・システム構成・ソフトウェア
- モデル予測制御の基礎(基本的な考え方)
- モデル予測制御の欠点
- 参考文献
この記事を書いた人
 こーし(@mimikousi)
こーし(@mimikousi)
目次
モデル予測制御とは
モデル予測制御とは
モデル予測制御(MPC: Model Predictive Control)とは、下記の特徴をもつ制御手法です。
- プロセスの動特性をモデルとして持つ
- 各時刻で未来の制御量を予測
- 制御量と設定値が一致するように操作量の最適化を行う
モデル予測制御は、PID制御以来、プロセス制御に最も大きな影響を与えた制御手法と言われています。
また、モデル予測制御は、プロセス産業界から生まれた制御手法であり、大学の理論家が生み出したものではなく、企業の現場で誕生し実用化されました。
つまり、実用性に重きを置かれており、理論は後から整備されています。

モデルの種類
モデル予測制御に用いるモデルには、下記の種類があります。
モデルの種類
- インパルス応答モデル
- ステップ応答モデル
- 伝達関数モデル
- 状態空間モデル
この中でも、現場から生まれたモデル予測制御では、「インパルス応答モデル」、「ステップ応答モデル」が使われています。
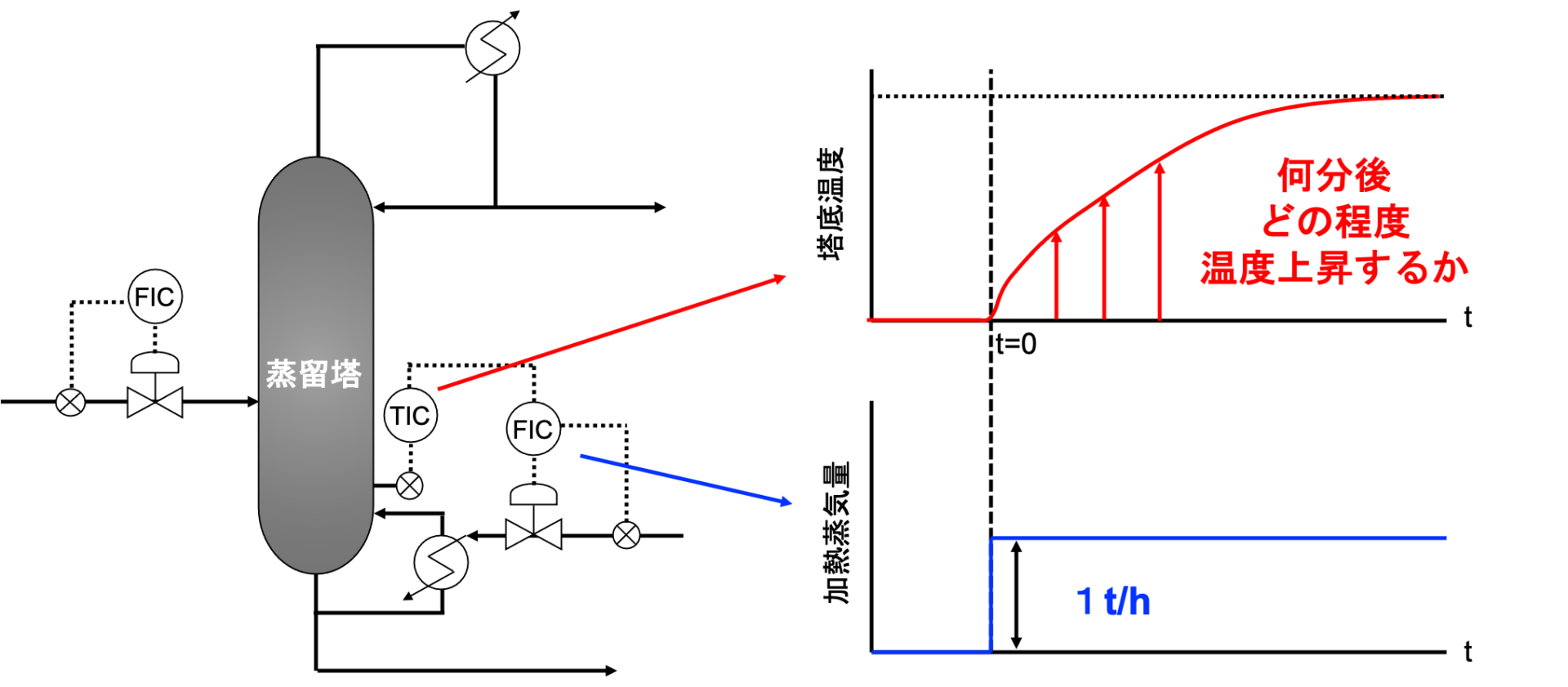
特に現場でよく使われているステップ応答モデルのイメージを下図に示します。
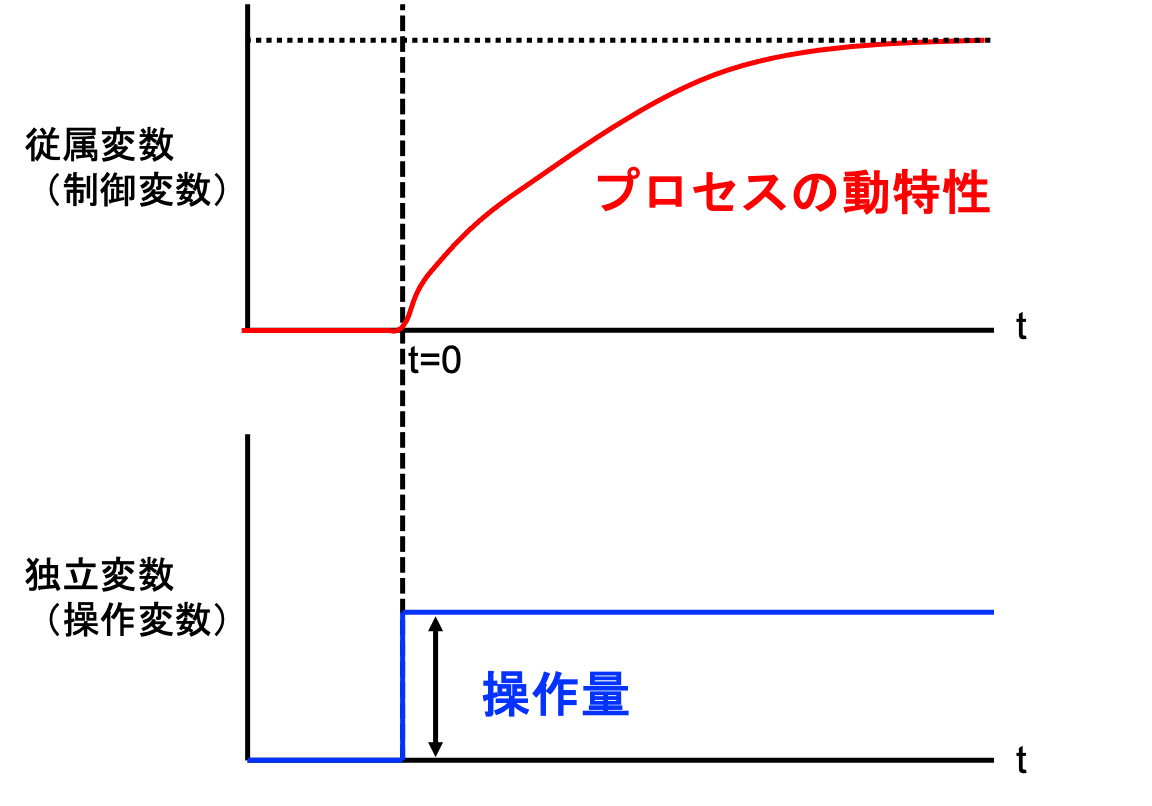
理解しやすくするため、蒸留塔における例を示しておきます。
蒸留塔リボイラーの加熱蒸気の設定流量を\(1 \rm t/h\)、ステップ状に大きくしたとします。
加熱蒸気の流量が増加しますので、塔底の温度が上昇します。
このとき、加熱蒸気の流量が「独立変数(操作変数)」となり、塔底の温度が「従属変数(制御変数)」となります。
下図のように、「加熱蒸気の流量が変化したときに、塔底の温度がどう変化するか」というモデルをもつことで、未来の挙動を予測して制御することが可能になります。
モデル予測制御の特徴
モデル予測制御の特徴を下記にまとめました。
モデル予測制御の特徴
- 制御アルゴリズムやモデルが理解しやすい
- 操作量、状態量、制御量に課せられた制約を直接取り扱える
- 外乱を考慮できる
- 上位の最適化ソフトと連動させ、プロセスの経済的最適運転を実現できる
プロセス制御において、特に重要な点は、下記の2点です。
- 装置や安全性の「制約」を制御アルゴリズムの中で取り扱える
- 「経済的最適運転」を実現できる
プラントでは、制約近傍で運転することで、効率的な運転となる場合が多いです。
モデル予測制御は、制約を考慮しながら制御することが可能なので、プロセス制御の目的の一つである「最適経済運転」を可能とします。
よって、プロセス制御において「モデル予測制御」は重要な役割を担っています。
確かに、理論的というより実用的です!
ちなみに、プロセス制御の目的は下記3点です。
プロセス制御の目的
①安全運転
②安定運転
③最適経済運転
プロセス制御の目的については、下記記事で詳しく解説しています。
-

-
プロセス制御とは?【現役エンジニアが解説】
続きを見る
モデル予測制御の歴史
モデル予測制御について深く理解するためには、モデル予測制御の歴史を紐解く必要があります。
まず、モデル予測制御がプロセス制御の分野で脚光を浴びたのは、1970年代後半のIDCOMとDMCの論文が始まりです。
- IDCOM(Identification and Command)
- DMC(Dynamic Matrix Control)
しかし、当時は「プロセス制御」というマイナーな制御分野からの論文であったため、大学の制御理論家の目には止まりませんでした。
その後、1980年代後半に、適応制御の分野からGPCの論文が出たため、数多くの制御理論家がモデル予測制御の研究を始めることになりました。
- GPC(Generalized Predictive Control)
下表は、モデル予測制御の論文をまとめたものです。
|
発行年 |
論文タイトル |
著者 |
内容 |
|
1963 |
Use of linear programming methods for synthesizing sampled-data sutomatic systems |
Propoi |
Moving Horizon Controllerの概念を提唱 IDCOMやDMCが特許化できなかった要因と言われている 特許化できなかったため、様々なソフトウェアの開発と商品化が促進された |
|
1977 |
A Modified Quadratic Cost Problem and Feedback Stabilization of a Linear System |
Kwon |
IEEE Automatic Controlに掲載 最適制御の分野 receding horizonの考え方を提唱 |
|
1978 |
Model Predictive Heuristic Control |
Richalet |
別名:IDCOMの論文 Automaticaに掲載 プロセス制御の分野 |
|
1979 |
Dynamic Matrix ControlーA Computer Control Algorithm |
Culter |
別名:DMCの論文 AIChE(米国化学工学会)に掲載 Culterは、1ヶ月以上プラントを目前にして考え抜いた末、DMCのアルゴリズムを生み出したと言われている プロセス制御の分野 |
|
1987 |
Generalized Predictive Control- PartⅠandⅡ |
Clarke |
別名:一般化予測制御(GPC)の論文 Automaticaに掲載 適応制御の分野 SISO系の理論(多変数系ではない) 制御理論家の「モデル予測制御」への関心が高まるキッカケとなる |
また、モデル予測制御の基本的な考え方である「receding horizon」は、1960年代のPropoiの論文と1970年代前半のKwonの論文の中で見つかりました。※receding horizonについては、後述。
このためIDCOMとDMCは決定的な特許を取得できず、様々なソフトウェアが開発され、商品化されたと言われています。
モデル予測制御の種類
モデル予測制御の種類と特徴について下表にまとめました。
IDCOMとDMCは企業が開発し、GPCは制御理論家が開発しました。
この中で、最も有名で、最もよく使われているのはShell(米)が開発したDMCです。
|
|
IDCOM |
DMC |
GPC |
|
開発者 |
Adersa(仏) Richalet |
Shell(米) Culter |
Oxford (英) Clarke |
|
論文 |
1978年 |
1979年 |
1987年 |
|
使用モデル |
インパルス応答モデル |
ステップ応答モデル |
伝達関数モデル |
|
評価関数 |
予測値と参照軌道の二乗誤差 |
予測値と設定値の二乗誤差と操作変数の変化量の二乗和 |
出力値と設定値の二乗誤差と操作変数の変化量の重みつき二乗和の期待値 |
モデル予測制御のシステム構成
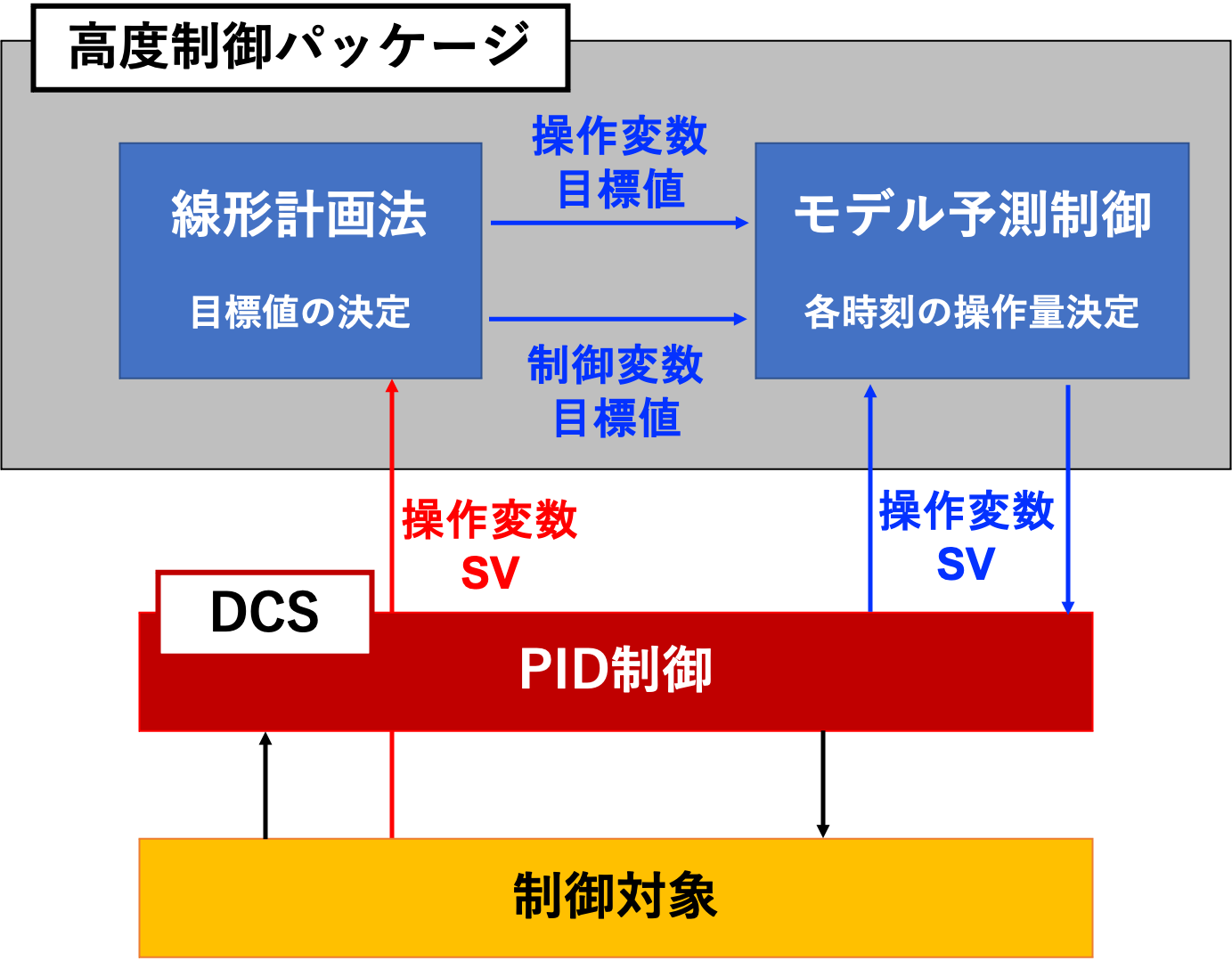
上図のように、モデル予測制御は、PID制御の上位に乗っかる形で機能します。
PID制御については、こちらの記事で解説しています。
-
-
【わかりやすく解説】化学系のためのPID制御
続きを見る
また、線形計画法(LP:Linear Programming)を用いて、制約(上下限値)の範囲内で最適解を算出し、操作変数と制御変数の目標値を決定します。
モデル予測制御では、外乱などによって刻々と変わる制御量に対し、具体的な操作量(SV:Setting Value)を決定します。
一般に、モデル予測制御は、線形計画法などのソフトウェアとまとめて、「高度制御パッケージ」として販売されています。
モデル予測制御のソフトウェア一覧
日本のプラントにおいて導入可能なモデル予測制御ソフト(高度制御パッケージ)を下表にまとめました。
| 会社名 | 製品名 |
| aspentech | Aspen DMC3 |
| Emerson | DeltaV高度制御 |
| Rockwell | Pavilion8 |
| Honeywell | Profit Controller(RMPCT) |
| 横河電機 | Platform for Advanced Control and Estimation |
| azbil | SORTiA-MPC |
| 三菱ケミカルエンジニアリング | MECMACS |
各社からモデル予測制御のソフトウェアが提供されておりますが、理論自体は1970年代から存在し、古い技術であるため、差別化は難しいと思います。
よって、各社製品の差別化ポイントは、下記の通りです。
差別化ポイント
- DCSインターフェース
- モデル同定機能
- オンライン制御性能監視
- 計算時間の短縮
- モデルメンテナンス機能
- ユーザーインターフェース
- ソフトウェアの拡張性(上位最適化ソフト、プロセスシミュレータなど)
- 実装エンジニア・サポートエンジニアの質
モデル予測制御の基礎(基本的な考え方)
モデル予測制御の基本的な考え方
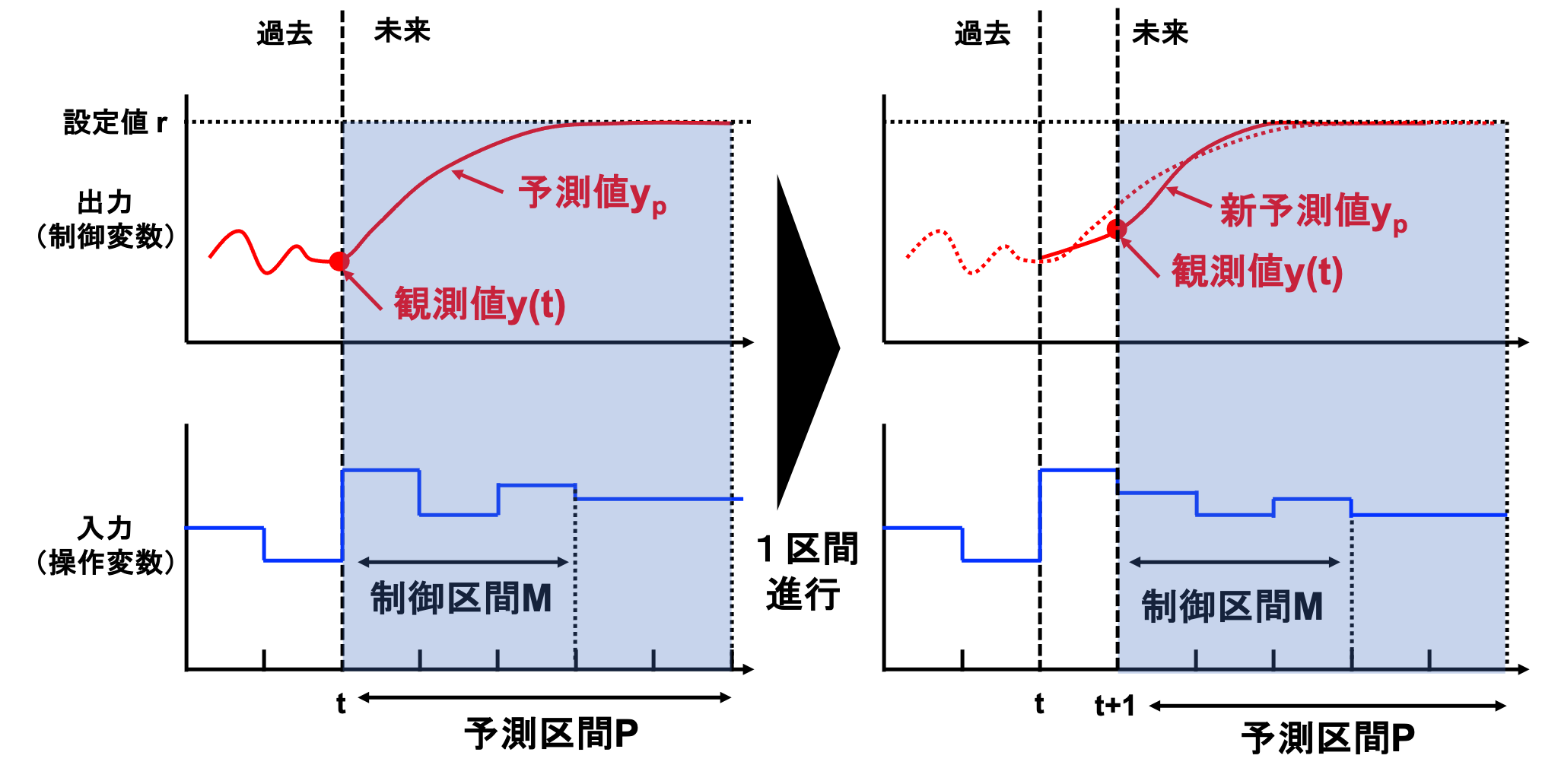
①予測区間をずらしながら(receding horizon)
②開ループ最適化を繰り返す
開ループ最適化を繰り返すというのは、下記の手順を示します。
開ループ最適化
- 制御量\(y(t)\)の観測
- 制御量\(y_p(t+k)\)の予測 ⇒予測区間Pまで予測(k=1〜P)
- 操作量\(u(t+k)\)の決定 ⇒制御区間Mまで予測(k=1〜M)
- 操作量\(u(t)\)の印加 ⇒現時点の操作量のみ実行
上記2〜4の間は、フィードバックが無いため、開ループの最適化を繰り返していると見なします。
(開ループ最適化とは、出力をフィードバックせずに最後まで最適値を解くことです。)
また、モデル誤差は必ず存在するので、計算結果を実行すると予測した制御量からズレます。
よって、ズレた点を初期値として最適化計算をやり直します。
その際の計算区間のずらし方が「receding horizon」となります。
recending horizonとは
制御量の予測期間(P)と操作量を決定する制御区間(M)を、そのまま1区間ずらし、再び開ループ最適化を繰り返す考え方です。
※別名、moving horizonとも呼ばれています。
地平線(horizon)に向かって進むとき、地平線は近づくことなく、一定の距離を保って後ろに後退(receding)していきます。
よって、1区間毎に予測区間をずらしながら最適化計算を繰り返す様子が、この地平線の動きに似ていることからreceding horizon(後退ホライズン)と表現されています。
モデル予測制御の欠点
モデル予測制御の欠点
- モデルのズレ
- 計算負荷
モデル予測制御の欠点は、モデルと実際のズレがあると、制御が不安定になる点です。
化学プロセスでは、定修のたびにバルブの流量特性が変化したり、機器の汚れや触媒活性の低下などのために、プロセスの動特性が変化します。
よって、モデルを常に最適なものにアップデートする必要があります。
モデルアップデートの課題
・オンライン制御性能監視機能の充実
・モデル同定機能の充実
さらに、要素技術として鍵を握るのは、計算時間の短縮です。
モデル予測制御では、計算負荷が大きいため、PID制御に比べて演算周期を長く設定しています。
よって、応答が早いプロセスでは、モデル予測制御が向いていない場合もあります。
また、非線形性を考慮しようとする場合も、計算負荷が課題になってきます。
よって、現時点では、非線形の制御には使いにくいというのがモデル予測制御の欠点です。
まとめ
まとめ
- モデル予測制御は、現場で生まれた現実的な制御手法
- 制約を考慮することで、最適経済運転を可能にする
- 使用されるインパルス応答モデル、ステップ応答モデルが直感的に理解しやすい
- 各社製品の差別化ポイントは、ユーザーインターフェースなどのソフトウェア
- 欠点は、モデルのアップデートが必要な点と非線形制御にはまだ使いにくい点
参考文献
1.モデル予測制御―制約のもとでの最適制御 ヤン・M・マチエヨフスキー著
2.大嶋:モデル予測制御ー理論の誕生・展開・発展ー,計測と制御,39−5(2000)
3.大嶋,小河:モデル予測制御Ⅰー基礎編:発展の歴史と現状,システム/制御/情報,39-5(2002)